
Сильный искусственный интеллект
- Разработка новых архитектур сильного машинного интеллекта на основе реверс-инжиниринга принципов работы мозга.
Лаборатория когнитивных архитектур занимается разработкой новых архитектур сильного искусственного интеллекта – ключевой технологии будущего массового мирового рынка робототехники.
По существу, речь идет о создании операционной системы нового поколения, наделяющей роботов способностью к самообучению сложному целесообразному поведению с большим горизонтом планирования, что пока недоступно современным роботам с программируемым поведением.
По существу, речь идет о создании операционной системы нового поколения, наделяющей роботов способностью к самообучению сложному целесообразному поведению с большим горизонтом планирования, что пока недоступно современным роботам с программируемым поведением.
Основной задачей проекта является создание искусственной психики роботов, позволяющей им самостоятельно планировать достижение поставленных целей и осуществлять эти планы, адаптируясь к изменяющейся обстановке. Решение будет основано на моделировании базовых архитектурных принципов работы мозга и построение взаимосвязей на уровне отдельных подсистем (зрение, слух, внимание, рабочая память и др.). Разработка позволит роботам обучаться решению сложных задач за существенно меньшее время и существенно меньшими вычислительными ресурсами в отличие от известных аналогов.
Технологии
В результате выполнения проекта созданы:
Alpha-версия «ADAM» тестировалась на открытой платформе OpenAI Gym, предназначенной для апробации и тренировки сильного ИИ, а также для проведения соревнований между R&D-проектами, основанными на алгоритмах обучения с подкреплением. Данный ресурс предлагает большое количество тестовых (игровых) окружений. Для целей проекта было использовано одно из них - MountainCar-v0, позволяющее сымитировать действия автомобиля, пытающегося подняться на возвышение. Условия задачи предполагают, что двигатель автомобиля недостаточно мощный, чтобы преодолеть препятствие. Поэтому алгоритм за определенное количество попыток должен самостоятельно найти решение, которое состоит в том, чтобы путем раскачивания вперед-назад нарастить импульс и разогнать объект до нужной мощности.
- оригинальная авторская архитектура искусственной психики Deep Control, прообразом которой является кортико-стриарная система передней части мозга млекопитающих, управляющая их поведением и мышлением (в отличии от архитектуры современных нейросетей, прообразом которой является задняя часть мозга, отвечающая за распознавание ситуации);
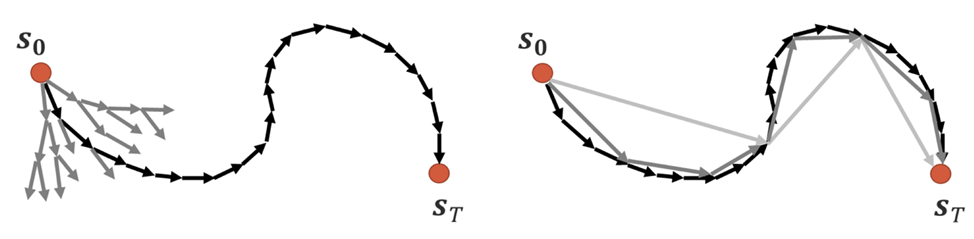
- биологически обоснованный действующий прототип искусственной психики роботов «ADAM» (акроним от Adaptive Deep Autonomous Machine) с архитектурой Deep Control, который является основой операционных систем автономных роботов нового поколения. Прототип обладает элементами базовых свойств искусственной психики (самостоятельное целеполагание, многоуровневое планирование, обучение новым навыкам и др.). Архитектура ADAM, например, в отличие от DeepMind AlphaZero от Google, построена на обучении не отдельным действиям, а их наиболее полезным комбинациям.
Alpha-версия «ADAM» тестировалась на открытой платформе OpenAI Gym, предназначенной для апробации и тренировки сильного ИИ, а также для проведения соревнований между R&D-проектами, основанными на алгоритмах обучения с подкреплением. Данный ресурс предлагает большое количество тестовых (игровых) окружений. Для целей проекта было использовано одно из них - MountainCar-v0, позволяющее сымитировать действия автомобиля, пытающегося подняться на возвышение. Условия задачи предполагают, что двигатель автомобиля недостаточно мощный, чтобы преодолеть препятствие. Поэтому алгоритм за определенное количество попыток должен самостоятельно найти решение, которое состоит в том, чтобы путем раскачивания вперед-назад нарастить импульс и разогнать объект до нужной мощности.

В ходе работ прототип стабильно демонстрировал базовые элементы взаимодействия с тестовой (игровой) средой, получен конкурентноспособный (как минимум top-10) по сравнению с другими известными алгоритмами результат.
Дальнейшее развитие ADAM осуществляется путем апробации технологии для решения прикладных задач, где требуется обучение когнитивным навыкам при отсутствии обучающих выборок большого объема (например, «Обучение техническим приемам гуманоидного робота-футболиста» в рамках направления «Робофутбол» Центра).
Дальнейшее развитие ADAM осуществляется путем апробации технологии для решения прикладных задач, где требуется обучение когнитивным навыкам при отсутствии обучающих выборок большого объема (например, «Обучение техническим приемам гуманоидного робота-футболиста» в рамках направления «Робофутбол» Центра).
Отрасли применения
Полученный результат будет востребован, прежде всего, производителями робототехники, которые смогут обучать базовую модель различным профессиям без программирования, путем «дрессировки». Например, в зависимости от задачи БПЛА можно наделить функциями патрулирования, доставки, наблюдения за пасущимся скотом, опыления растений и др. Кроме того, решения на основе искусственной психики найдут применение и в других отраслях, где требуется обучение когнитивным навыкам при отсутствии обучающих выборок большого объема.
Партнеры
ООО «Интеллект Групп»,
ПАО «Мобильные Телесистемы»,
Фонд перспективных исследований.
ПАО «Мобильные Телесистемы»,
Фонд перспективных исследований.
Руководитель проекта
Шумский Сергей Александрович – к.ф.-м.н.