
Операционная среда роботов xoRDE
- Разработка специализированной «операционной системы» программирования роботов.
Технологии
В рамках проекта создана операционная система программирования роботов «xoRDE», обеспечивающая управление роботами различной конфигурации – от колесных до биподных и бимануальных – готовая к использованию в парадигме «из коробки», принятой в ИТ-индустрии (что на сегодняшний день недостижимо при работе с существующими решениями).
xoRDE» состоит из пополняемую библиотеку скомпилированных программных модулей и стеков протоколов для управления роботом, начиная от сбора данных с сенсоров, их обработки в режиме реального времени до выработки управляющих команд с последующей передачей на актуаторы, а также удобную среду для создания сборок под конкретных роботов (в т.ч. графический интерфейс задания режимов работы робота, не требующий написания программного кода). «xoRDE» является полноценной операционной системой, готовой к использованию «из коробки», в отличие от аналогов типа Robot Operating System (ROS, разработка компании Willow Garage), которые представляют собой набор библиотек, которые пользователь должен самостоятельно скомпилировать и отладить.

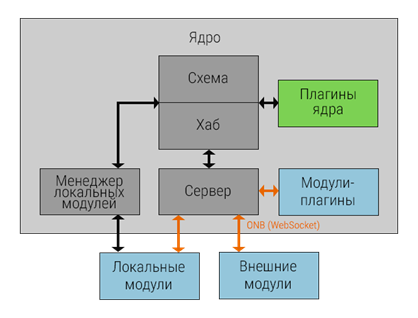
Использование универсального протокола ONB, работающего на нескольких интерфейсах (CAN, UART, USB, TCP\IP), позволяет подключать в xoRDE приводы и сенсоры различных роботов, таких как LEGO EV3, TurtleBot3, коллаборативных роботов-манипуляторов Universal Robots и антропоморфных роботов.
Также в библиотеку были добавлены модули зрения, речи и распознавания лиц, обеспечивающие «искусственный интеллект» робота.
«xoRDE» запускается на разных компьютерных платформах (Windows, Linux) и не требует программирования со стороны пользователя.
Также в библиотеку были добавлены модули зрения, речи и распознавания лиц, обеспечивающие «искусственный интеллект» робота.
«xoRDE» запускается на разных компьютерных платформах (Windows, Linux) и не требует программирования со стороны пользователя.
Демонстрация работы прототипа операционной среды роботов xoRDE осуществляется на примере управления коллаборативными роботами UR3e (компании Universal Robots) и РобоКом (компании Нейроботикс, разработан МФТИ в рамках проекта «Ассистивные технологии с нейроуправлением» НТИ). Роботам ставится задача по захвату и переносу тестовых объектов (по команде манипулятор, управляемый xoRDE, последовательно задействует алгоритмы, ответственные за распознавание предмета, расчет траектории перемещения, ориентацию захватного устройства, выполнение захвата и перенос объекта). С помощью речевого интерфейса также корректируются действия xoRDE, обучать неизвестным для него характеристикам предметов.
Демонстрационные ролики работы операционной системы
Отрасли применения
- Разработчики и стартапы в области робототехники;
- Разработчики высокотехнологичных решений с интегрированными технологиями технического зрения, обработки естественного языка, управления системами с большим числом степеней подвижности;
- Обучающие курсы по робототехнике (в школах и институтах);
- Производители и потребители коллаборативных роботов;
- Производители и потребители социальных роботов, в том числе роботов-логопедов, роботов-речевых ассистентов и компаньонов, информационных роботов-антропоморфов и др.
Партнеры
ООО «Нейроботикс»,
Digital Transfer Center.
Digital Transfer Center.
Руководитель проекта
Конышев Владимир Анатольевич